














Os engenheiros da Nissan foram inspirados pelo Reino Animal a desenvolver novas tecnologias que determinarão o futuro da mobilidade . Um dos objetivos de longo prazo do da Nissan é minimizar os acidentes .
A alegação é que a figura tende a zero ao longo dos anos. Toru Futami, diretor de tecnologia e pesquisa avançada, argumenta que o estudo do comportamento dos animais que se movem em grupos ajuda os engenheiros a entender como os veículos podem interagir entre si para alcançar um ambiente de direção mais seguro e eficiente.
"Em nossa pesquisa constante para desenvolver sistemas anti -colisão para a próxima geração de carros, precisamos nos inspirar na Mãe Natureza para encontrar a resposta mais apropriada. Nesse momento, a pesquisa se concentra nos padrões de comportamento dos peixes".
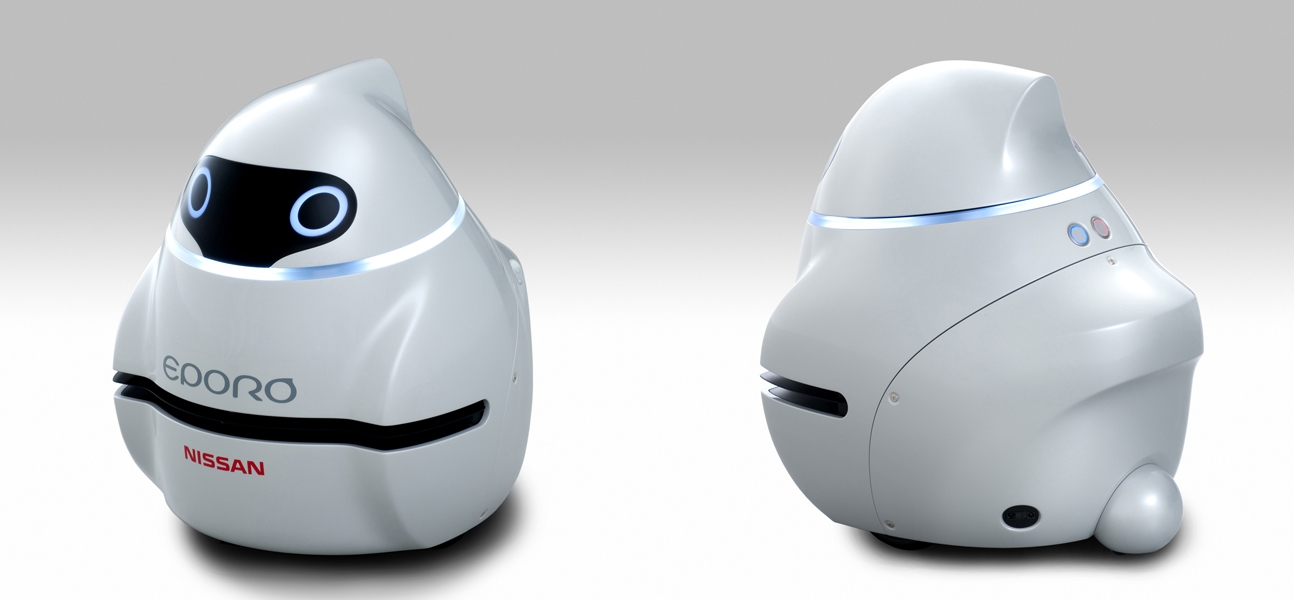
A equipe de pesquisa criou o Eporo (Episódio 0 robô), usando a tecnologia LRF Laser (Laser Range Finder) -inspirada por olhos compostos de abelhas, cujo campo de visão cobre mais de 300 graus -, juntamente com outras tecnologias avançadas. Seis unidades do robô Eporo se comunicam para controlar suas posições. O objetivo é o dobro: evite colisões e poder viajar de um lado para o outro ou em uma direção, da mesma maneira que os peixes quando se movem sob a água agrupados em bancos.
"Nas leis atuais de trânsito, supõe -se que os carros dirigam dentro das faixas e obedecem aos sinais da estrada por ordem do motorista, mas se todos os carros fossem autônomos, a necessidade de faixas e até sinais pudesse desaparecer. Conversamos antes sobre os peixes, e os peixes seguem estas três regras: não vão muito longe, não se aproximarem dos outros.
A Futami acrescenta que o robô também tem a capacidade de se comunicar com seus colegas em um cruzamento, para que eles possam tomar a decisão que poderia acontecer e que não, eliminando assim a necessidade de sinais de trânsito.
Antes do desenvolvimento do Eporo, a Nissan criou a unidade biométrica do robô de carro, ou BR23C, que imita a curiosa capacidade de evitar colisões de abelhas. Este é um projeto conjunto com o Advanced Science and Technology Research Center da renomada Universidade de Tóquio.
Inspirado pelos olhos compostos pela abelha, que pode ver mais de 300 graus, o laser LRF (localizador de linha a laser) detecta obstáculos dentro de um raio de 180 graus a dois metros de distância. O BR23C calcula a distância do obstáculo e envia um sinal para um microprocessador, que traduz essas informações e move ou altera a posição do robô para evitar uma colisão.
"Em uma fração de segundo detecta um obstáculo", explica Toshiyuki Andou, diretor do Laboratório de Mobilidade da Nissan e chefe principal do projeto, "o robô imitará os movimentos de uma abelha e mudará imediatamente a direção para evitar um confronto".






































